Since and , the second of Equation 16 is equivalent to the statement that a component of may be nonzero only if the corresponding constraint is active. This is a complementary slackness condition studied in LP, which states that implies and implies .
Since is a relative minimum point over the constraint set, it is also a relative minimum over the subset of that set defined by setting the active constraints to zero. Thus, for the resulting equality constrained problem, defined in a nbhd. of , there are Lagrange multipliers. Therefore, we conclude that first of Equation 16 holds with if .
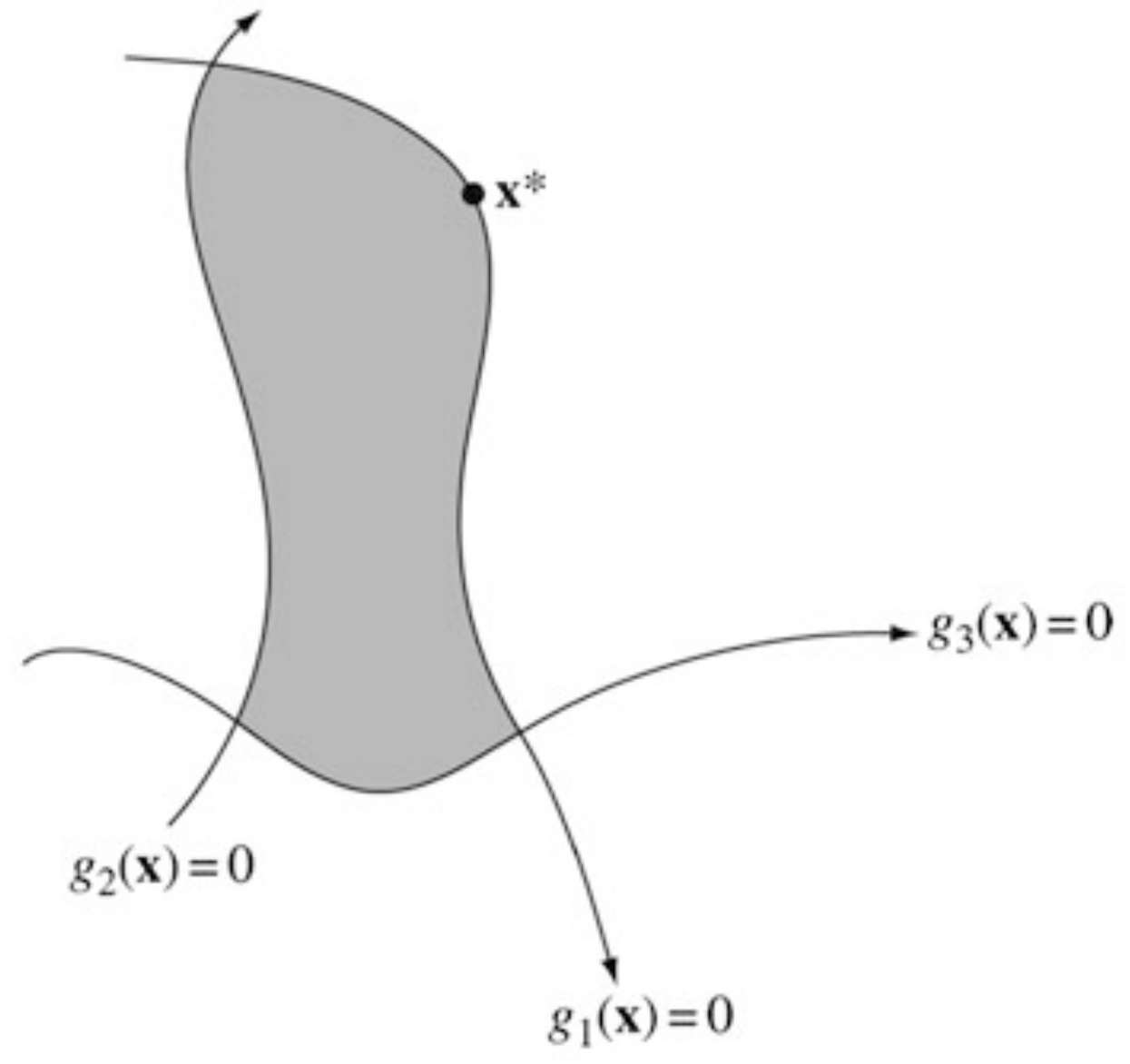
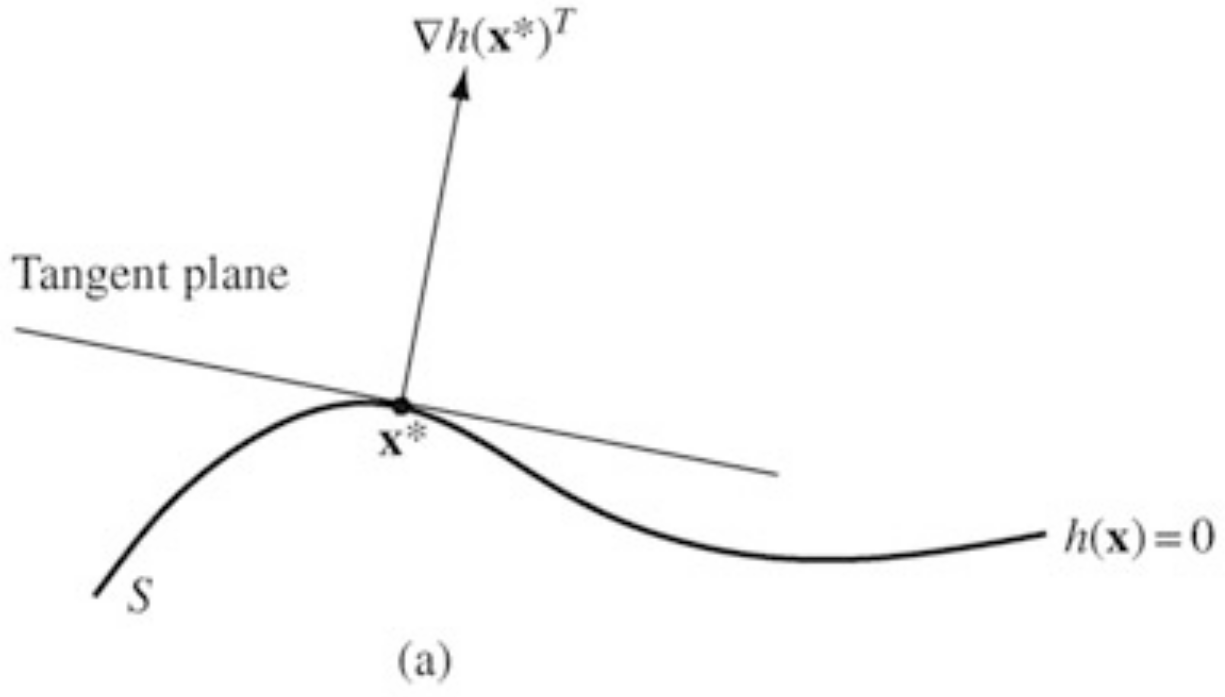
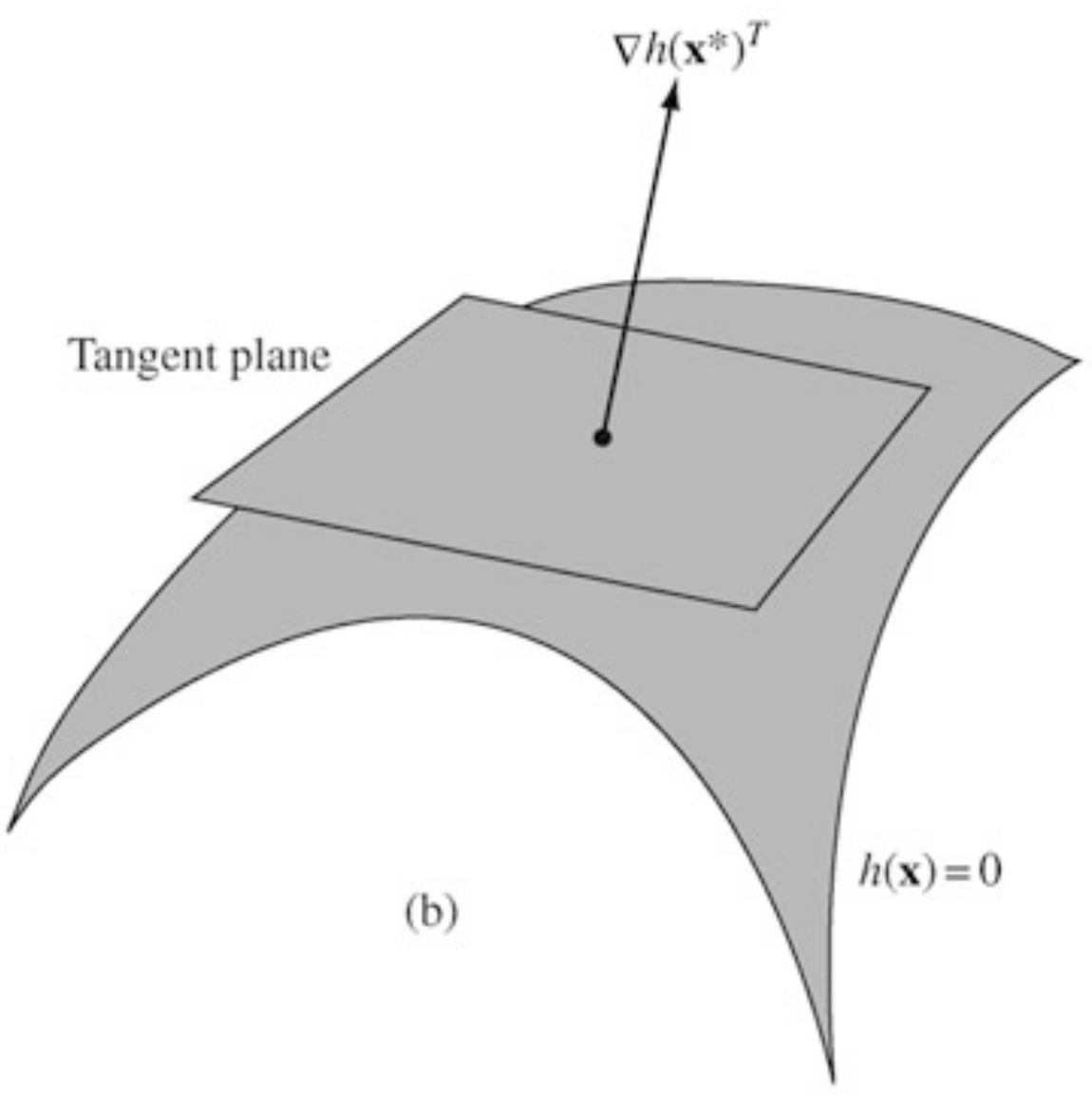
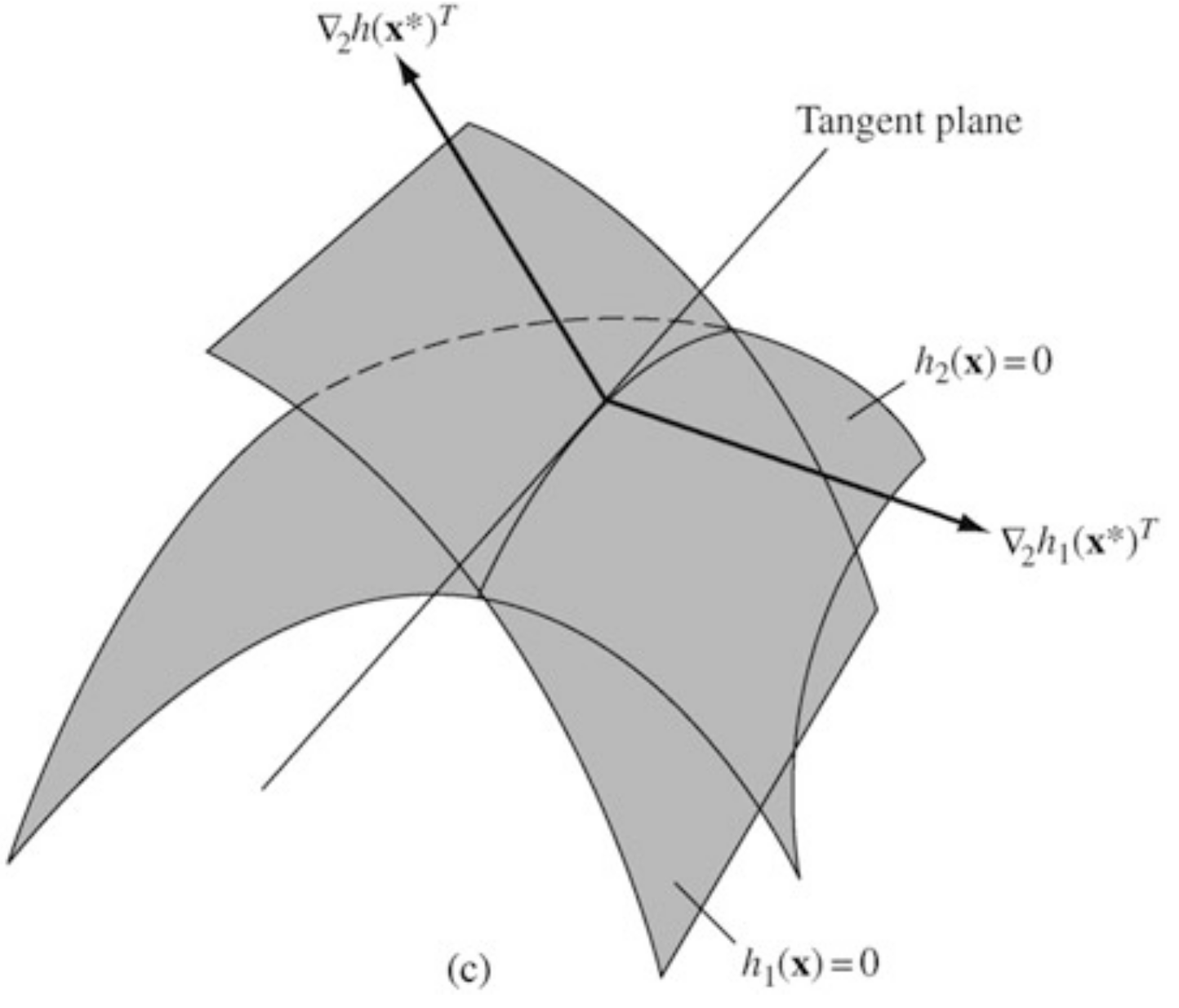
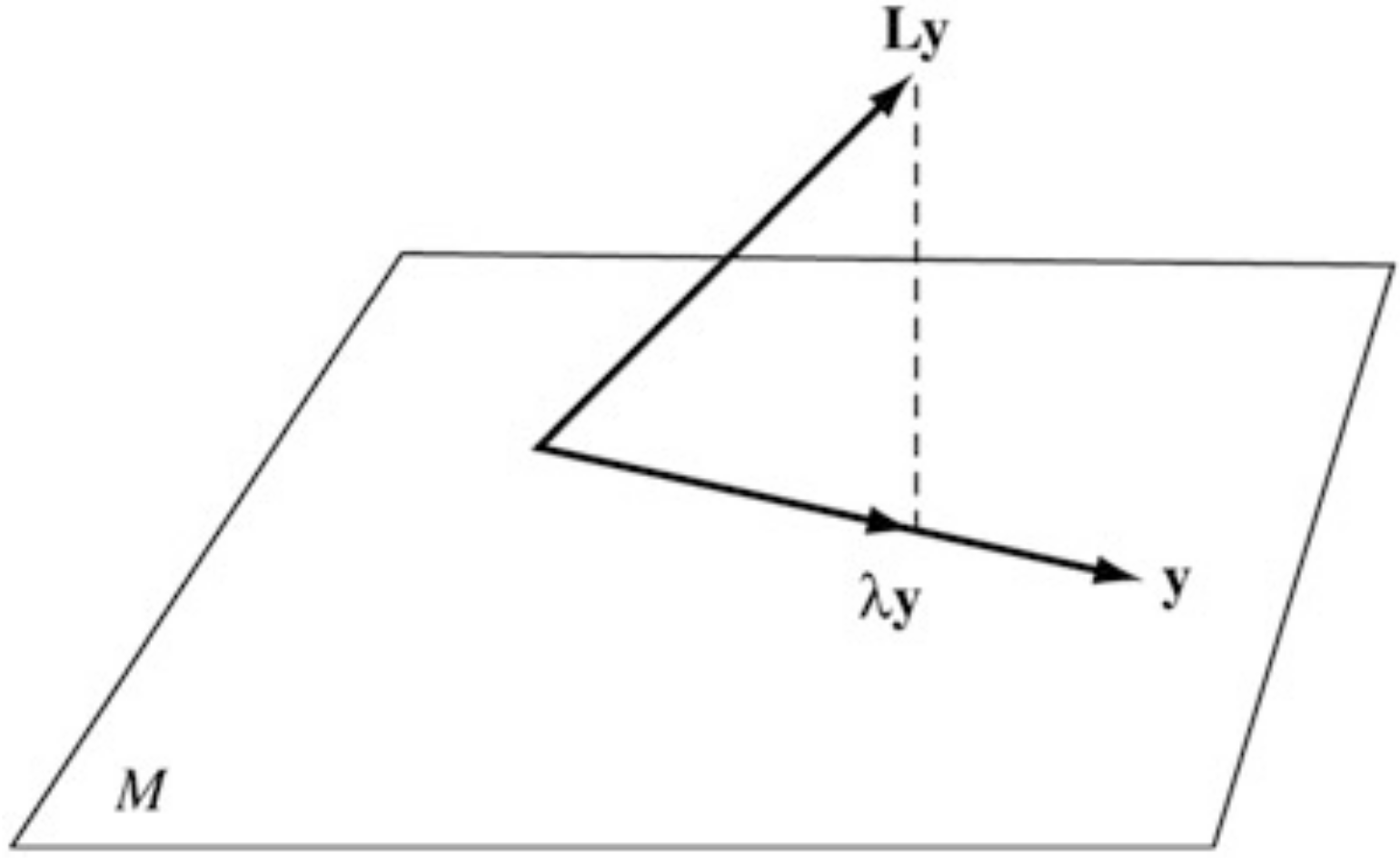
It remains to be shown that . Suppose for some . Let and be the surface and the tangent plane, resp., defined by all other active constraints at . By the regularity assumption, there is a such that , that is, and for all but , and . Multiplying this from the right to the first of Equation 16, we have
which implies that is a descent direction for the objective function.
Let with and . Then for small , is feasible – it remains on the surface of and because (that is, constrant becomes inactive). But
which contradicts the minimality of .