Model Predictive Path Integral Control
MPPI: Sampling-Based Optimal Control
Instructor: Hasan A. Poonawala
Mechanical and Aerospace Engineering
University of Kentucky, Lexington, KY, USA
Topics:
From MPC to MPPI
Stochastic optimal control
Information-theoretic derivation
Importance sampling update
Algorithm and properties
A Progression in Optimal Control
Each method relaxes one key assumption of the previous.
| Method | Dynamics | Key relaxation |
|---|---|---|
| LQR | linear | baseline: analytical solution |
| iLQR | nonlinear | drop linearity via local linearization |
| MPC | nonlinear | drop infinite horizon; add constraints; replan online |
| MPPI | nonlinear | drop differentiability; use sampling |
| PPO | unknown | drop the model entirely; learn from interaction |
LQR → iLQR → MPC all require differentiable dynamics and cost. MPPI breaks that requirement.
When Gradient-Based MPC Struggles
iLQR and SQP-based MPC compute Jacobians and Hessians of and at every step.
This fails (or becomes fragile) when:
- The cost is non-smooth: binary collision indicators, distance-to-obstacle, contact forces
- The dynamics involve contact or discontinuities: legged robots, manipulation with grasping
- The dynamics are a black-box simulator: no analytical gradients available
- The cost landscape is highly non-convex: many local minima, gradient descent gets stuck
MPPI’s answer: replace gradient computation with parallel sampling.
Roll out many trajectories, weight them by cost, take the weighted average. No derivatives needed.
Modern GPUs can run thousands of trajectory simulations in parallel — making sampling practical within a real-time control loop.
Stochastic Optimal Control Problem Setup
System and Cost
Work in discrete time with a control-affine stochastic system:
where is the control matrix (possibly state-dependent) and noise enters through the control channel.
The path cost over a horizon of steps is:
with running cost decomposed as:
- : state-dependent cost — may be non-smooth, non-differentiable, or even binary
- : quadratic control penalty
Stochastic Optimal Control Problem
Goal is to minimize cost
Subject to
- Dynamics are control-affine with noise entering through control
- Cost is sum-of-stage-costs:
- Stage cost has specific structure:
Information-Theoretic Reformulation
From Trajectory Optimization to Distribution Optimization
Rather than minimizing directly, search over distributions over trajectories.
Define the passive distribution : trajectories generated by rolling out the current nominal control sequence plus noise,
where and .
Pose the information-theoretic optimal control problem:
The two terms balance minimizing cost against staying close to the passive distribution.
Why the KL Term Is a Control Cost
For the control-affine system, the KL divergence between and is:
Setting , the KL penalty becomes:
The information-theoretic problem is therefore equivalent to the original stochastic optimal control problem — no approximation yet.
This is the key structural observation: the KL regularizer and the quadratic control cost are the same thing, linked by .
Optimal Solution
The Gibbs Distribution
The variational problem
has a closed-form solution. Taking the functional derivative and setting to zero:
This is the Gibbs (Boltzmann) distribution: it reweights the passive rollout distribution by an exponential of the negative cost.
- weight 1/cost
The temperature controls the sharpness:
| small | large |
|---|---|
| Greedy — concentrates on best trajectory | Diffuse — nearly uniform weights |
| Sharp selection | Exploration |
Free Energy
The normalization constant has a direct interpretation. Substituting back:
This is the free energy — the minimum achievable value of the information-theoretic objective.
By Jensen’s inequality applied to the convex function :
Optimal reweighting always improves over the passive (uncontrolled) rollout.
This mirrors the free energy in statistical mechanics, with playing the role of temperature .
Control Update via Importance Sampling
From Optimal Distribution to Control
Given , the optimal control at time is:
Using the definition of to convert to an expectation under :
This is importance sampling: sample from (the easy distribution), reweight by .
No gradients of or appear anywhere in this expression. The dynamics and cost are treated as black boxes.
Monte Carlo Approximation
Approximate with samples :
The normalized weights sum to one and are higher for lower-cost trajectories.
Numerical stability: subtract before exponentiating:
This is algebraically identical — cancels in the normalization — but prevents overflow.
When Is the Derivation Exact?
The derivation above is exact when:
- Dynamics are control-affine with noise through the control channel:
- The control cost satisfies , so the KL term and control cost coincide
In practice, MPPI is applied more broadly:
- Non-affine dynamics (black-box simulators)
- Binary or discontinuous costs
- Constraints encoded as large penalties
The free-energy / importance-sampling structure is retained as a principled heuristic, but the optimality guarantee no longer holds exactly.
Even as a heuristic, MPPI consistently outperforms random shooting because the weighted average biases the update toward the low-cost region of trajectory space.
The Algorithm
MPPI
At each time step with current nominal control sequence :
Input: current state x_t, nominal controls u[0:T-1], noise covariance Σ, temperature λ
1. Sample K perturbation sequences:
ε^(k)[s] ~ N(0, Σ) for k = 1..K, s = 0..T-1
2. Roll out each perturbed trajectory:
x^(k)[0] = x_t
x^(k)[s+1] = f(x^(k)[s], u[s] + ε^(k)[s]) for s = 0..T-1
3. Compute trajectory costs:
S^(k) = Σ_s ℓ(x^(k)[s], u[s] + ε^(k)[s]) + φ(x^(k)[T])
4. Compute normalized weights:
β = min_k S^(k)
w^(k) = exp(-(S^(k) - β) / λ)
w̃^(k) = w^(k) / Σ_j w^(j)
5. Update nominal controls:
u[s] ← u[s] + Σ_k w̃^(k) ε^(k)[s] for s = 0..T-1
6. Apply u[0], shift sequence: u[s] ← u[s+1], append u[T-1] = 0
Repeat at t+1 with new measured state.Key Properties
What MPPI Gives You
| Property | Explanation |
|---|---|
| No gradients | and treated as black boxes |
| Parallelizable | rollouts are independent → GPU threads |
| Non-smooth costs | Binary collision, discontinuous rewards work fine |
| Global search | Samples explore trajectory space, not just a local neighborhood |
| Temperature tuning | trades off exploitation vs. exploration |
What MPPI still requires: a dynamics model that can be simulated forward. It need not be differentiable, but it must be fast enough that rollouts complete within one control cycle. MPPI is still a model-based method.
Tuning Parameters
| Parameter | Effect | Typical guidance |
|---|---|---|
| (samples) | More → better approximation, more compute | 100–10 000; use as many as GPU allows |
| (horizon) | Longer → better planning, more compute | Match to task timescale |
| (temperature) | Lower → greedier; higher → more exploration | Tune; 0.1–10 typical |
| (noise) | Larger → wider exploration | Match to control authority |
Unlike iLQR, MPPI has no convergence criterion within a single control step — it runs a fixed number of samples per cycle. The quality of the solution improves with .
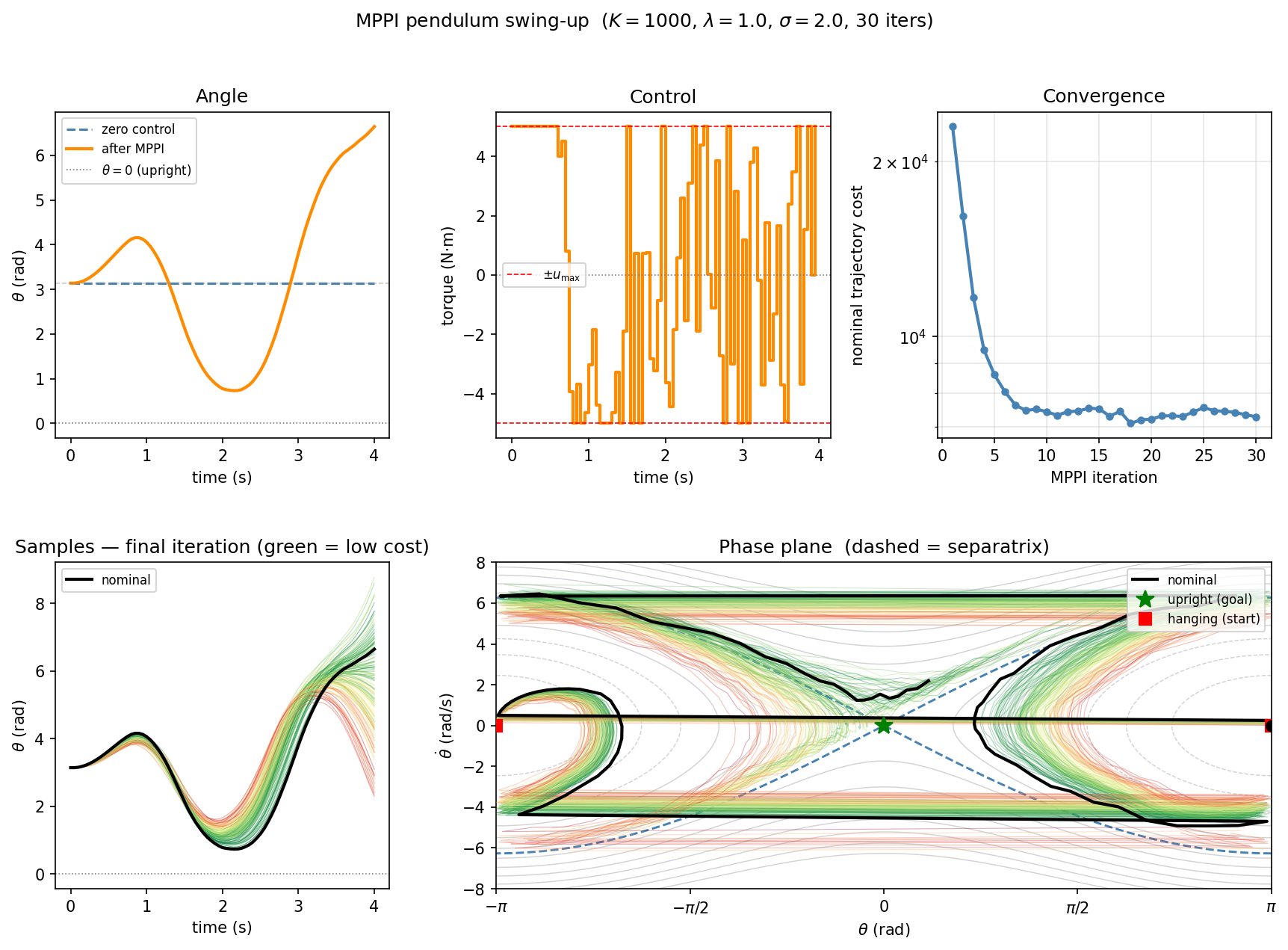
Demo
MPPI Pendulum Swing-Up
Pendulum swing-up from (hanging down) to or (upright).
Energy-shaping running cost: , where is the total mechanical energy and is the energy at the upright with zero velocity.
Results
MPPI vs. iLQR / MPC
Side-by-Side Comparison
| iLQR / MPC | MPPI | |
|---|---|---|
| Optimization | Gradient + Hessian (backward pass) | Weighted average of samples |
| Dynamics requirement | Differentiable , Jacobians | Simulatable only |
| Cost requirement | Smooth, differentiable | Arbitrary (non-smooth, binary ok) |
| Parallelism | Sequential backward pass | Embarrassingly parallel |
| Global search | Local (Newton steps) | Stochastic global via samples |
| Stability guarantees | Lyapunov (with terminal cost) | Not guaranteed in general |
| Warm-starting | Natural (shift previous solution) | Natural (shift previous controls) |
In practice: use iLQR/MPC when gradients are available and the landscape is well-behaved. Use MPPI for contact-rich systems, black-box simulators, or when the cost is non-differentiable.
Summary
MPPI
Core idea: replace gradient-based trajectory optimization with importance-weighted sampling.
Derivation in three steps:
- Pose stochastic OCP as minimizing
- Solve variationally → optimal is the Gibbs distribution
- Extract control via importance sampling → no gradients needed
Key trade-offs vs. iLQR/MPC:
- + No differentiability required; handles non-smooth costs and contact
- + Massively parallelizable on GPU
- − Still needs a fast forward model
- − No convergence guarantee within one control cycle; quality scales with
Optimal Control • ME 676 Home