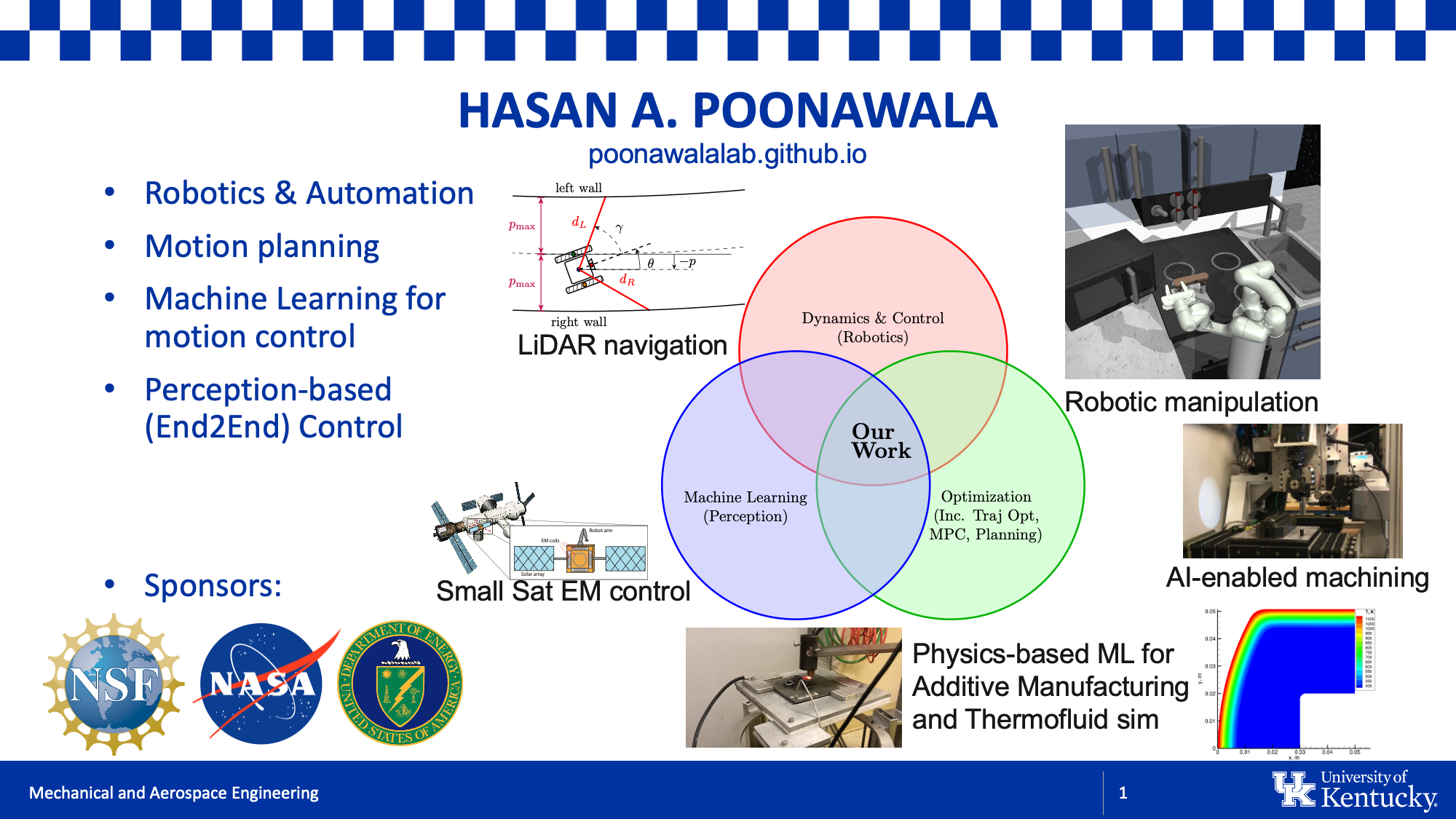
Overview
Motivation
Motivation

Navigation using Deep Learning
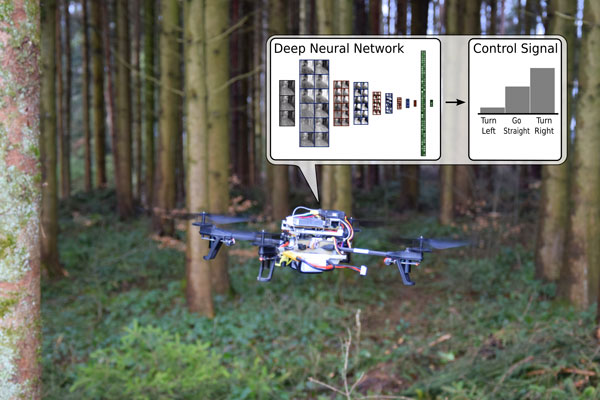
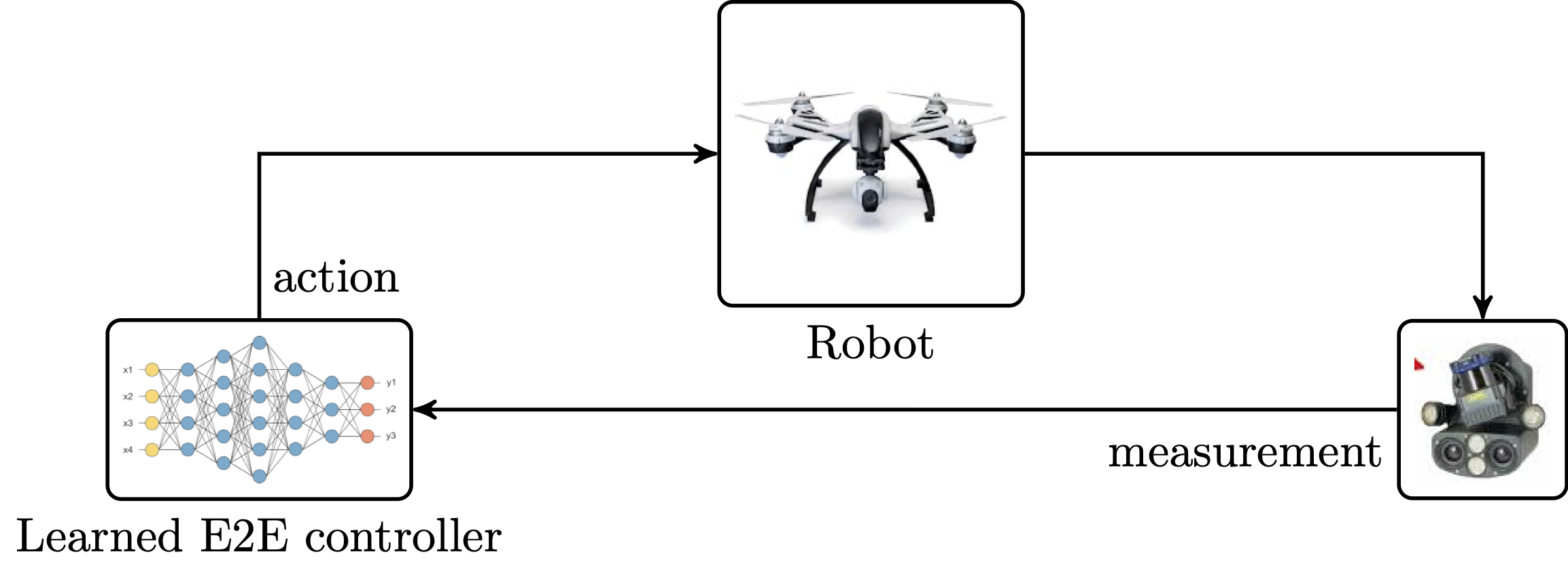
End-to-end Neural Net Control
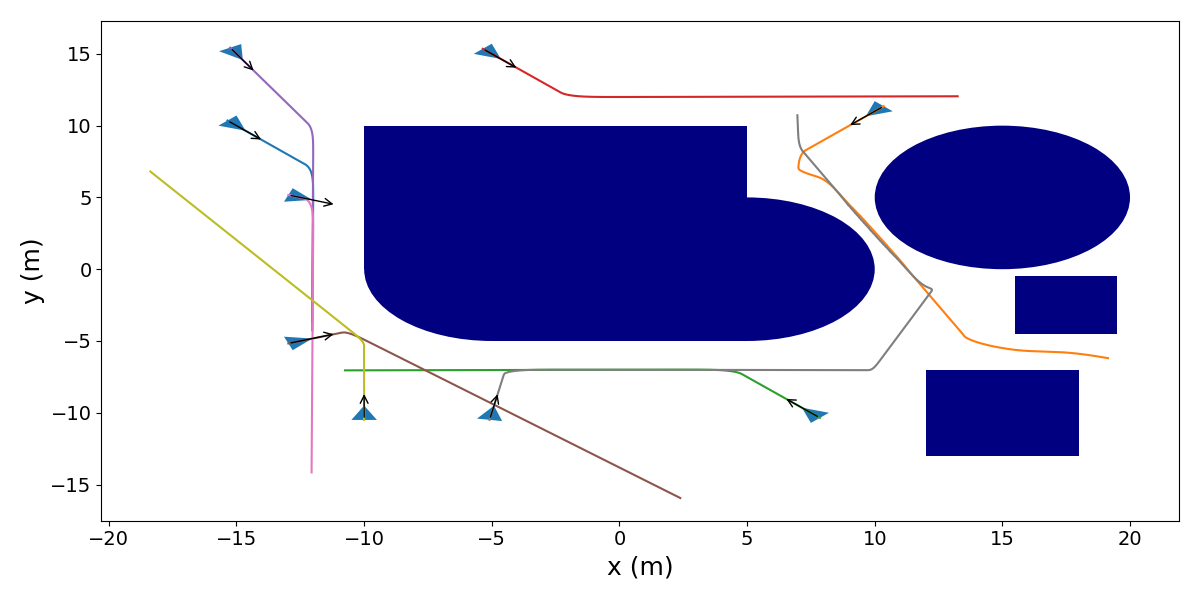
Navigation using Machine Learning

- Simple linear controller MB size
- Based on the Support Vector Machine
- Guaranteed to navigate hallway without crashing
Guaranteed Collision Avoidance
Mapping
Uses Pose-Graph-based SLAM, A, and pure pursuit algorithm to get to a location.
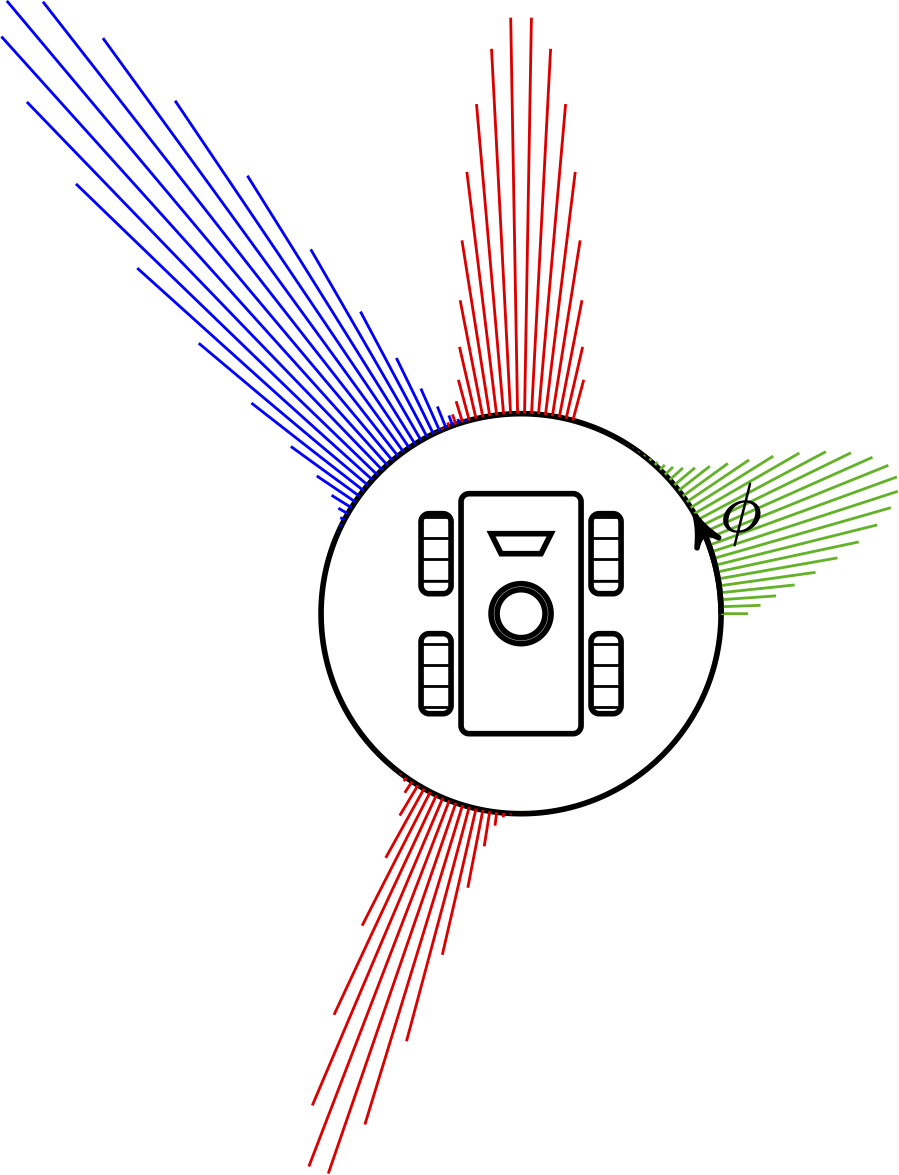
Distance-based Navigation
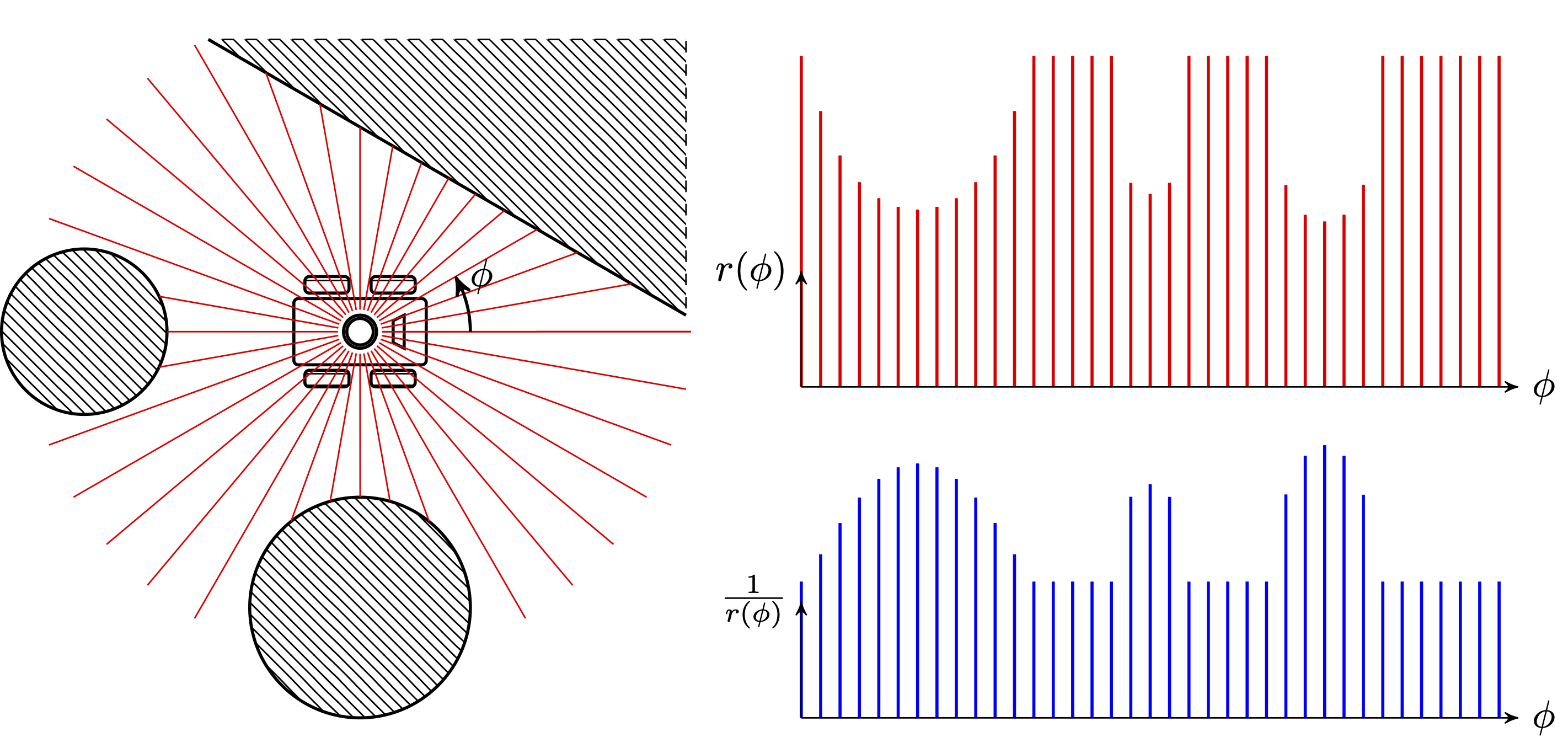
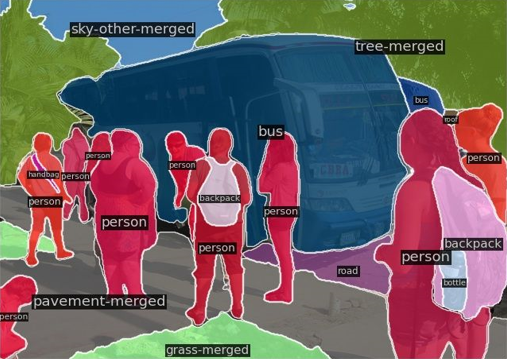
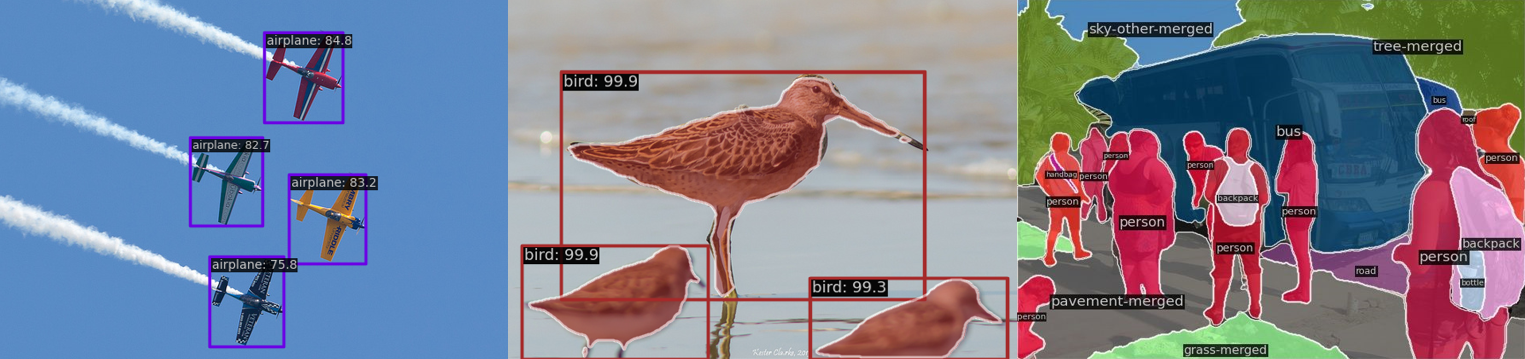
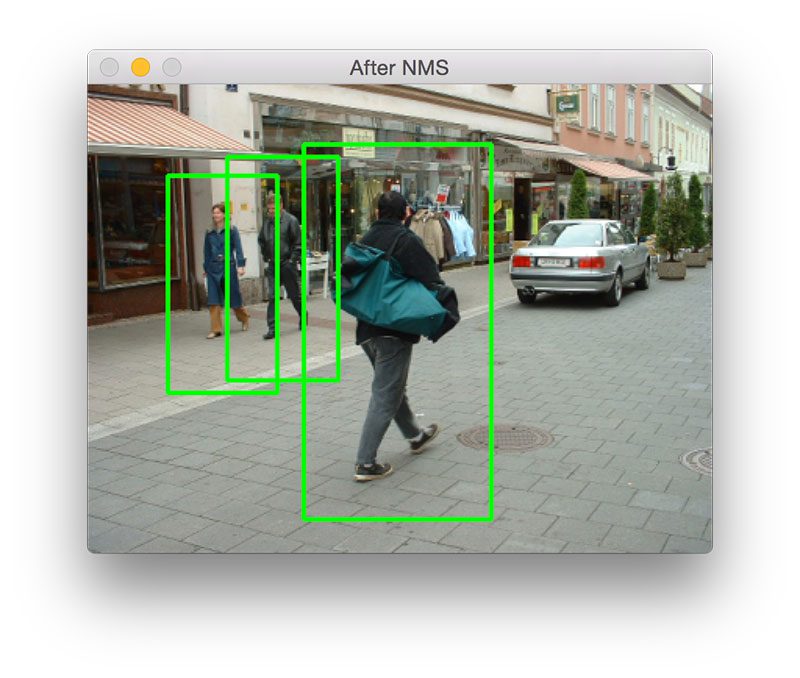
Object-aware Navigation
Replace with measure of object presence at
![]()
“Find bus below tree. Approach and help people getting on.”
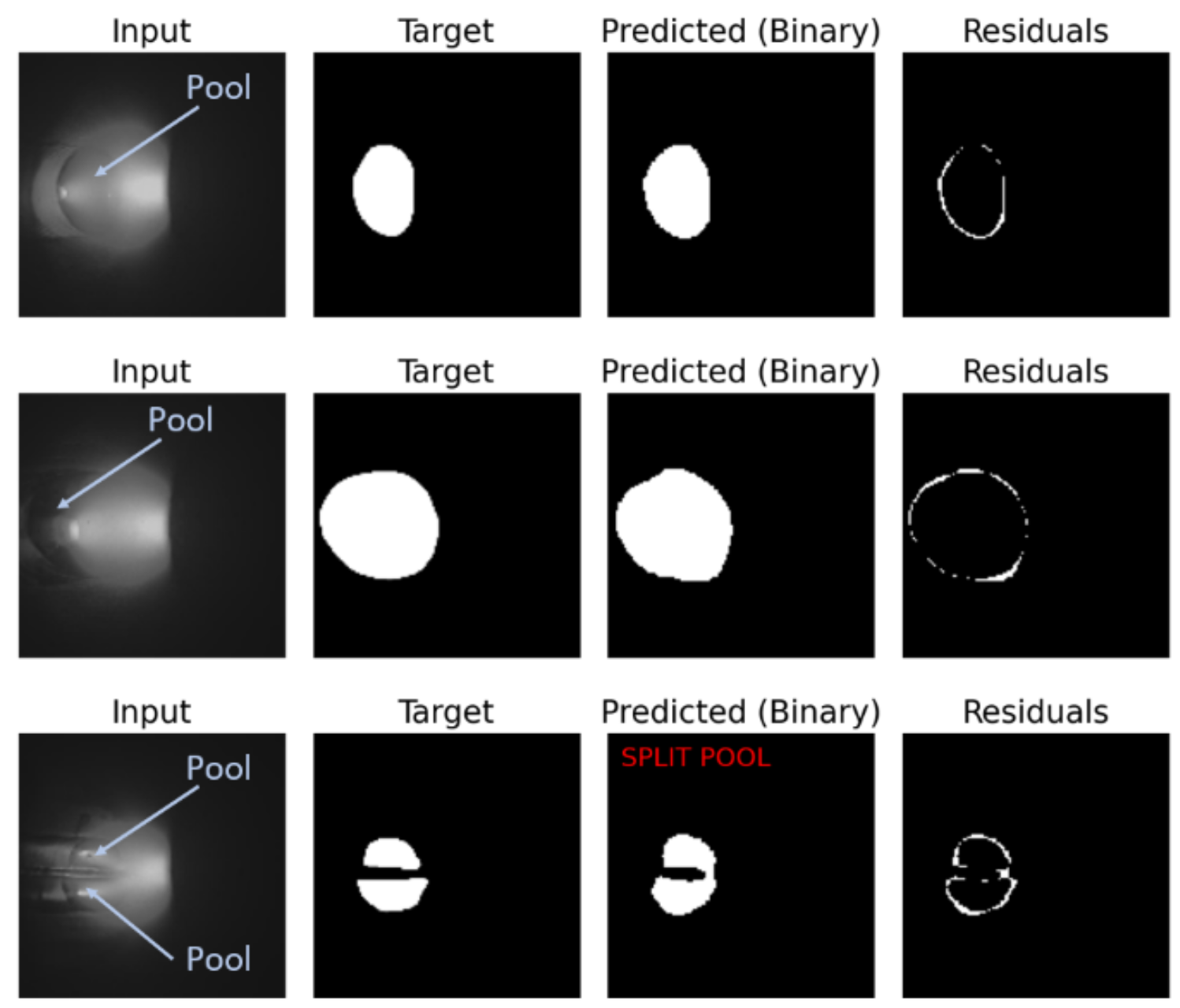
Yolov9 Segmentation Model
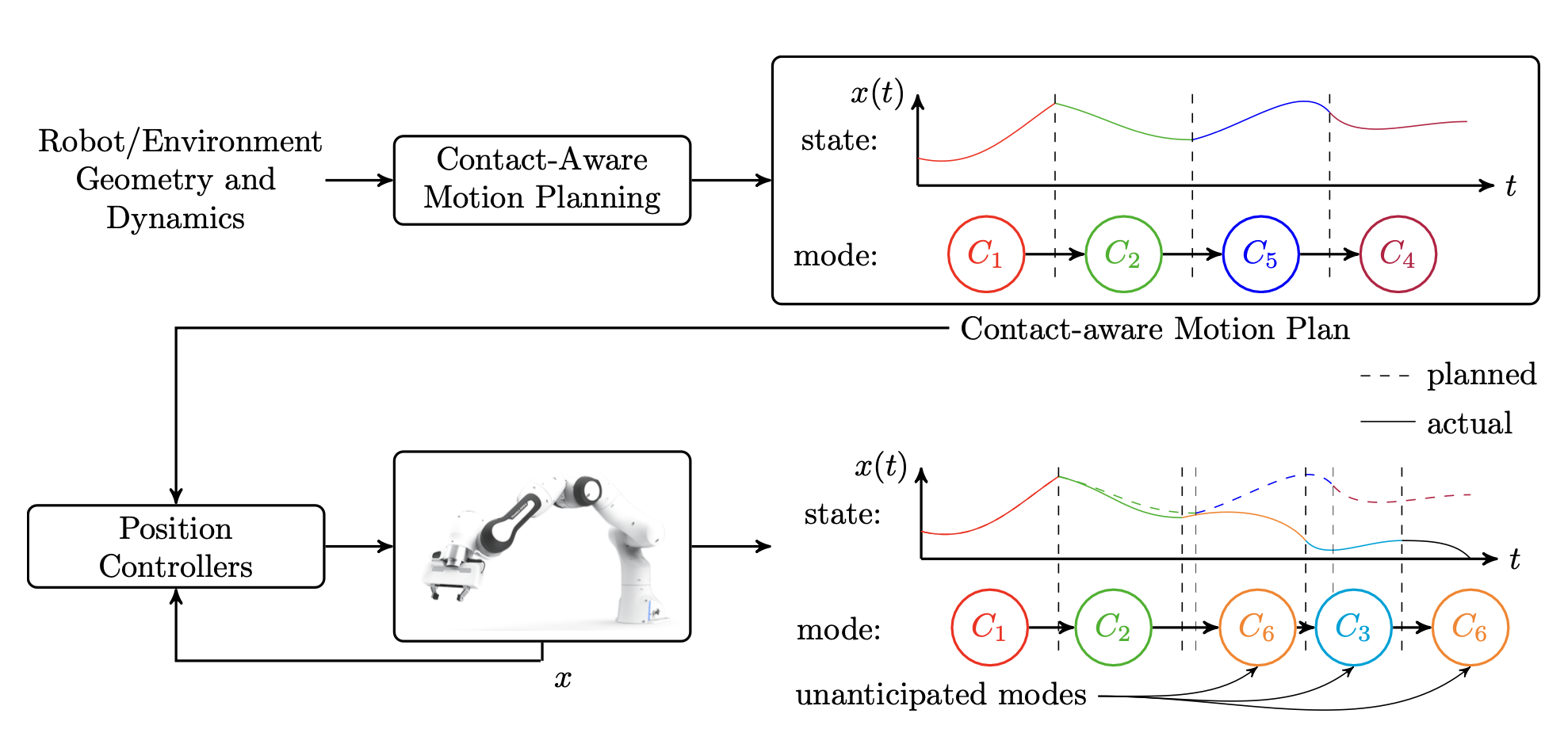
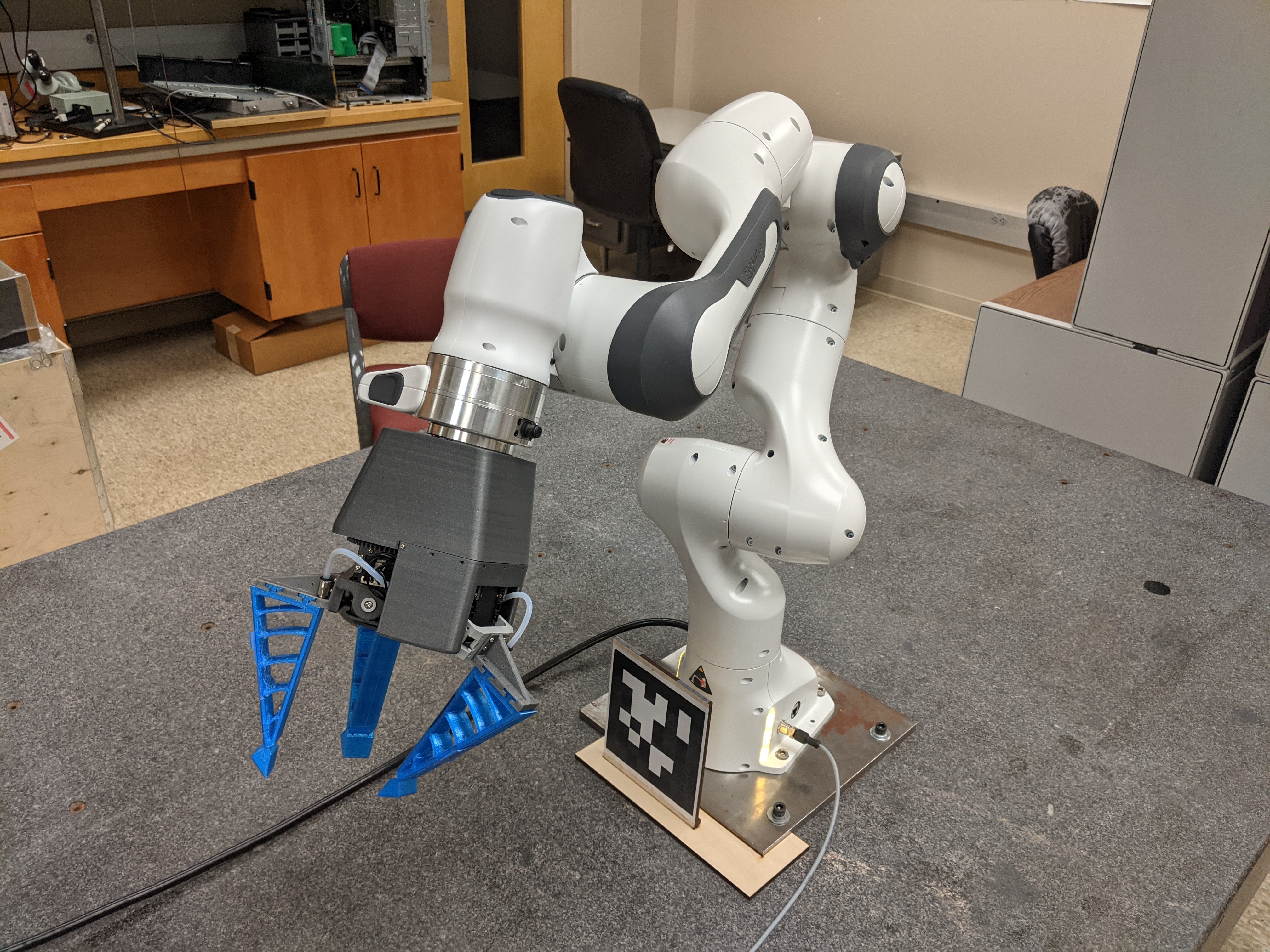
Contact-Rich Manipulation
DL for Smart Sensors and Data

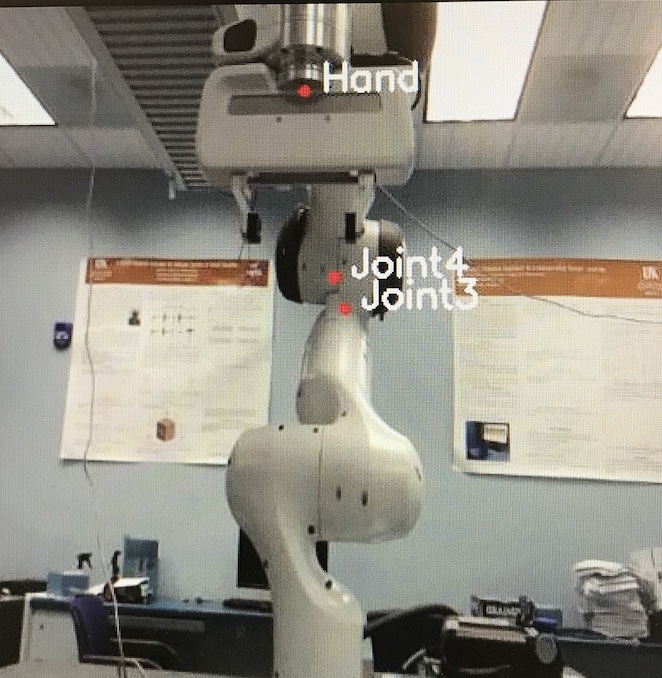
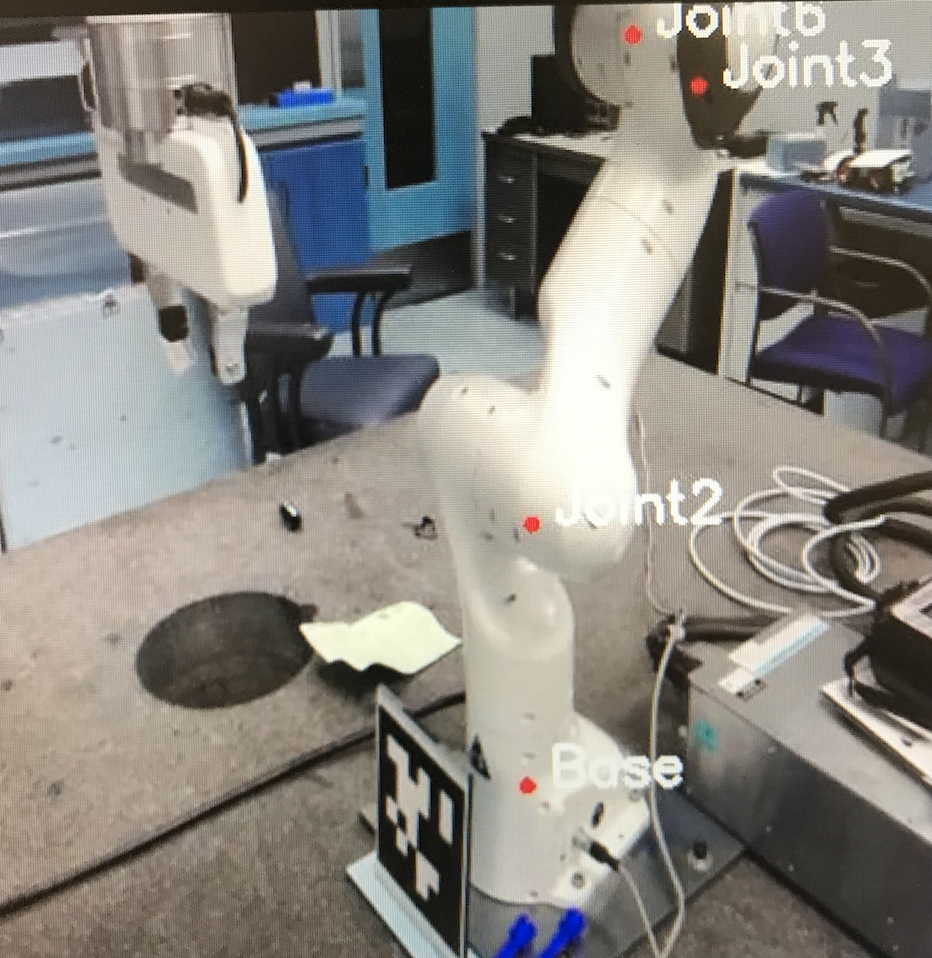
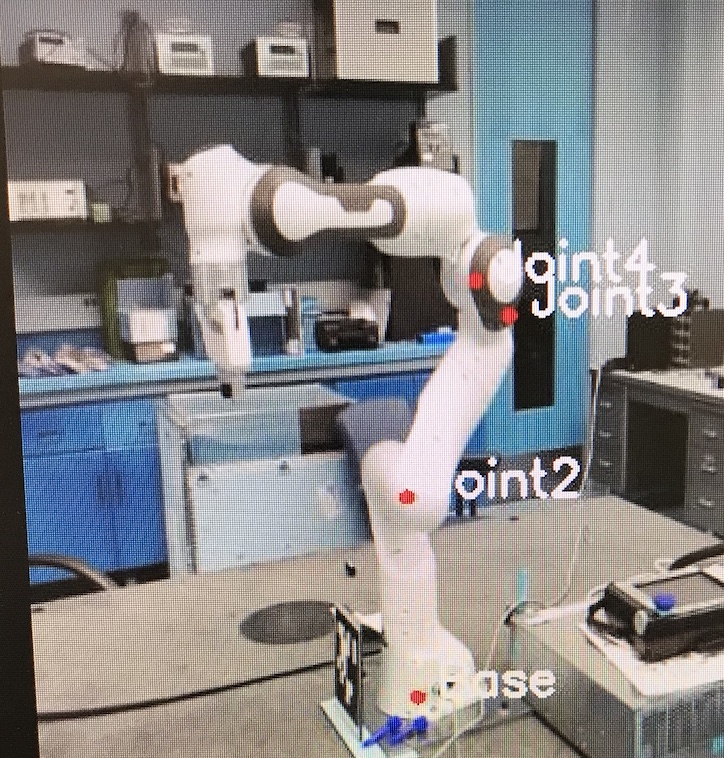
Tracking Robot Arms

DREAM Model
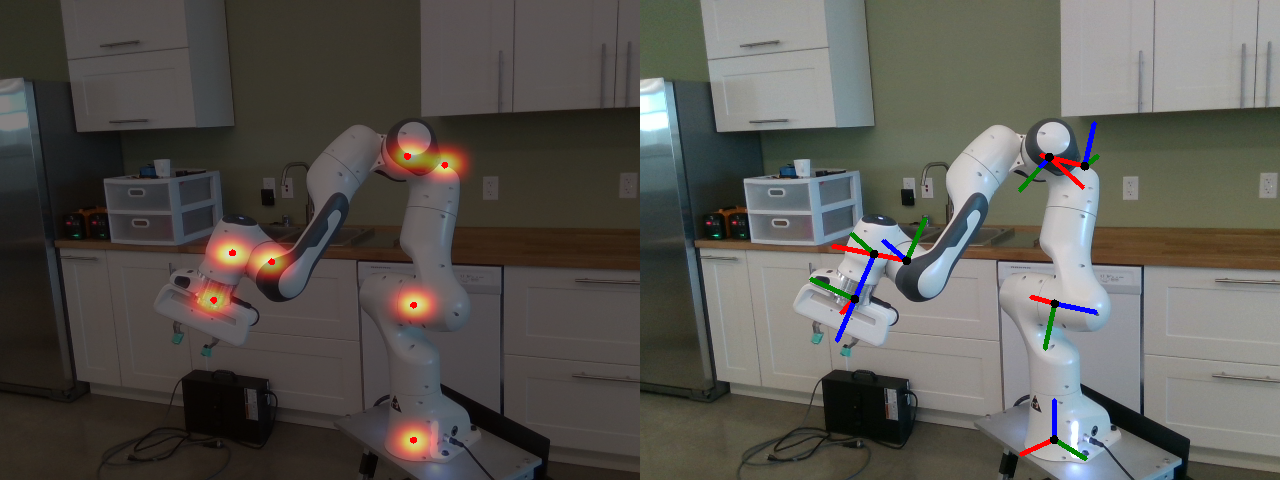
DREAM Model
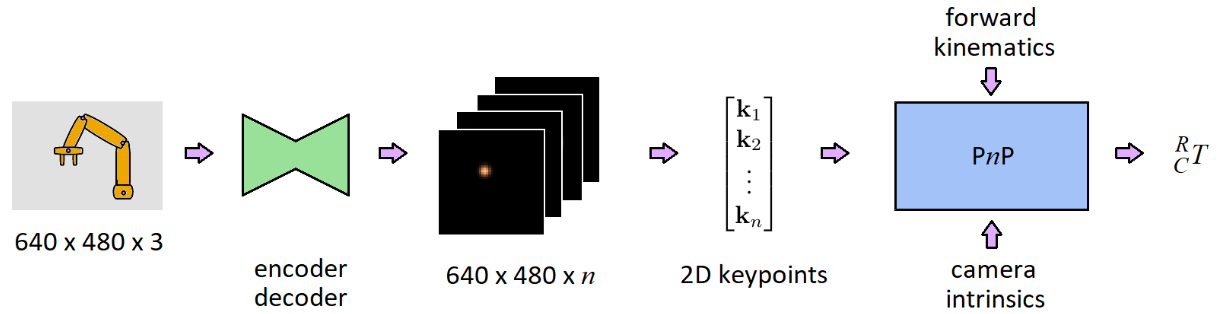
- 80 - 200 MB model depending on the backbone (VGG-X vs ResNet-X)
DREAM On Jetson Nanos